














































































































BIOMIME - Functional biology and biomimetics
kEYWORDS
Our research aims to develop new approaches for exploring biomechanical properties of plants to answer fundamental questions in functional biology, ecology, and evolution and develop biomimetic applications. We are developing projects for the transfer of biological properties to technological applications through interdisciplinary approaches and industrial partnerships.
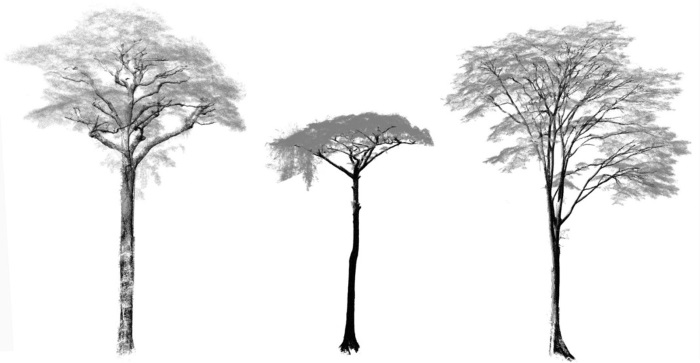
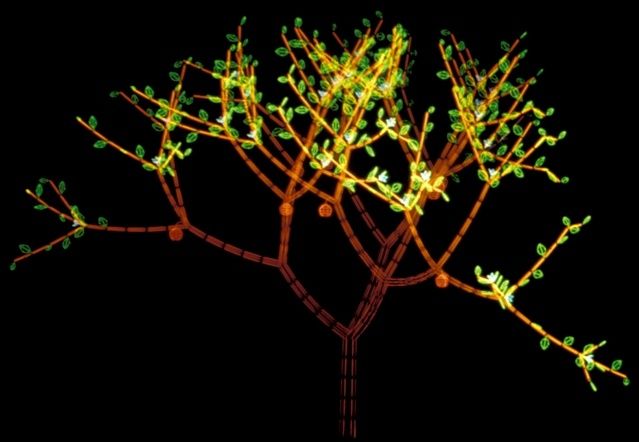
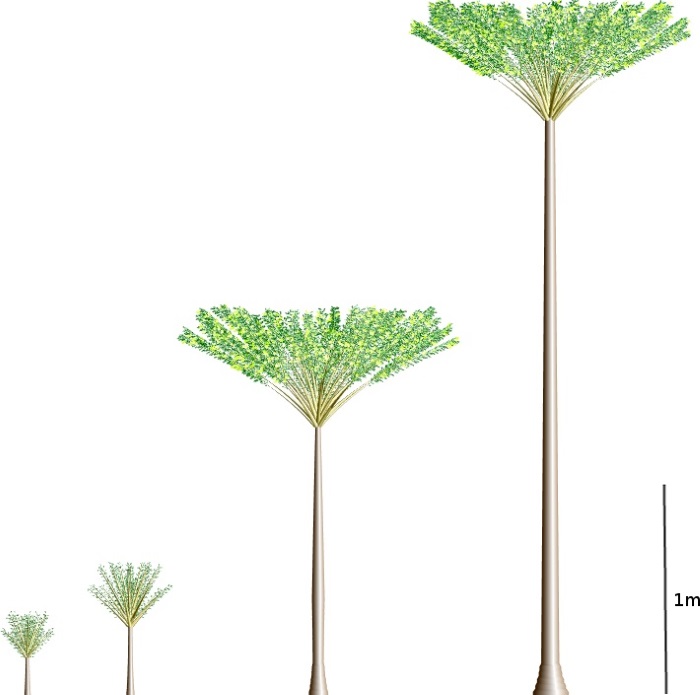
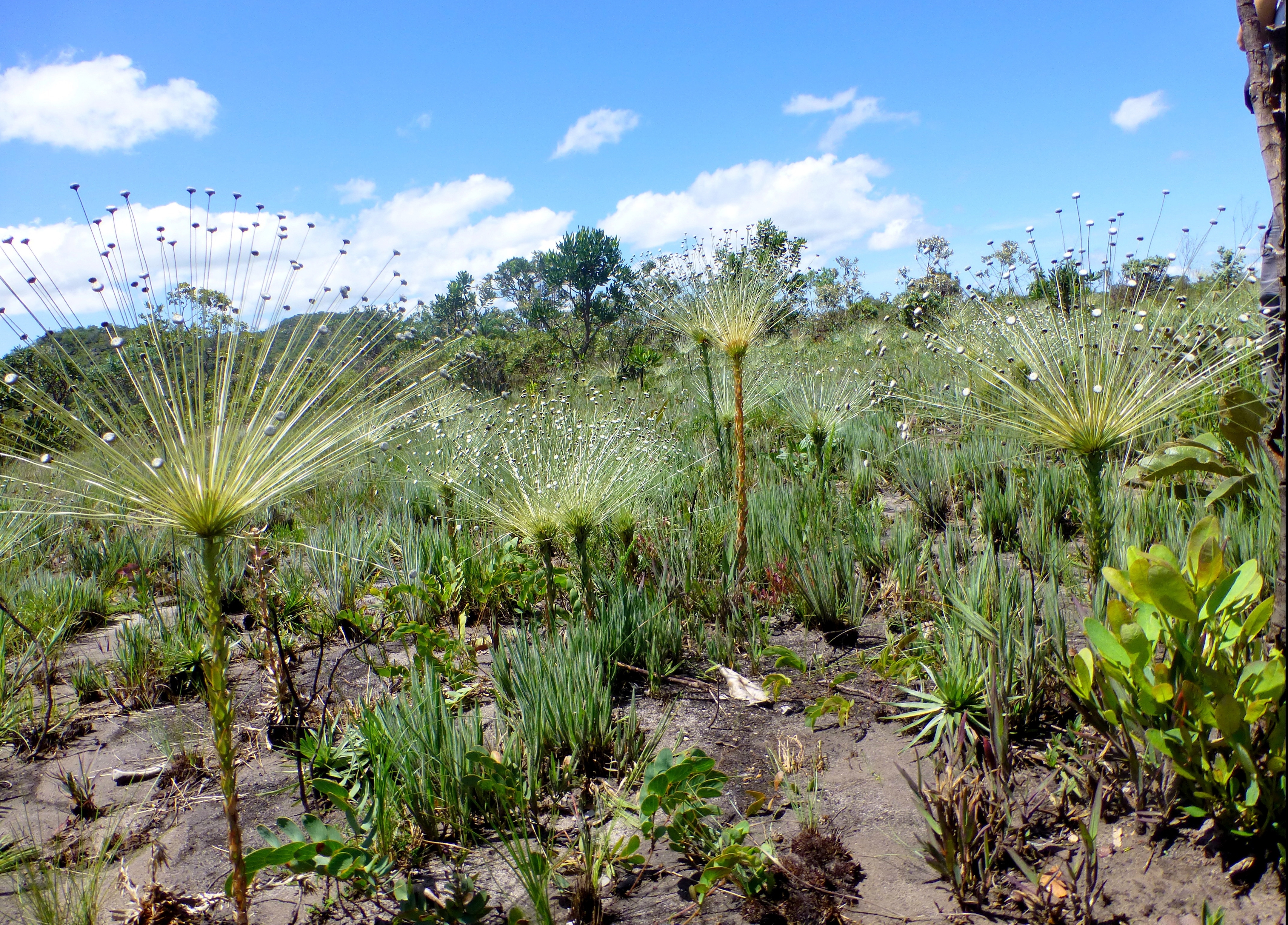
We study the biomechanical properties and functional traits of a wide range of herbaceous and woody plants and for a variety of questions encompassing: Functional trait evolution, ecological significance of biomechanical traits such as stem stiffness, rigidity, and resistance to perturbation and in particular the importance of developmental timing of plant traits for understanding ecological and evolutionary processes as well as biomimetic innovations. One of our main models for biomimetic innovation are climbing plants. We are studying the growth, reaching, and spanning capabilities, movements, attachment structures and the adaptive shift from highly stiff to highly flexible mechanical properties of the stems. Climbing plants are an exceptional source of inspiration for new types of movement-by-growth robotic artefacts. We are currently working with a diverse range of collaborators to develop a new generation of robots inspired by and based on climbing plants.
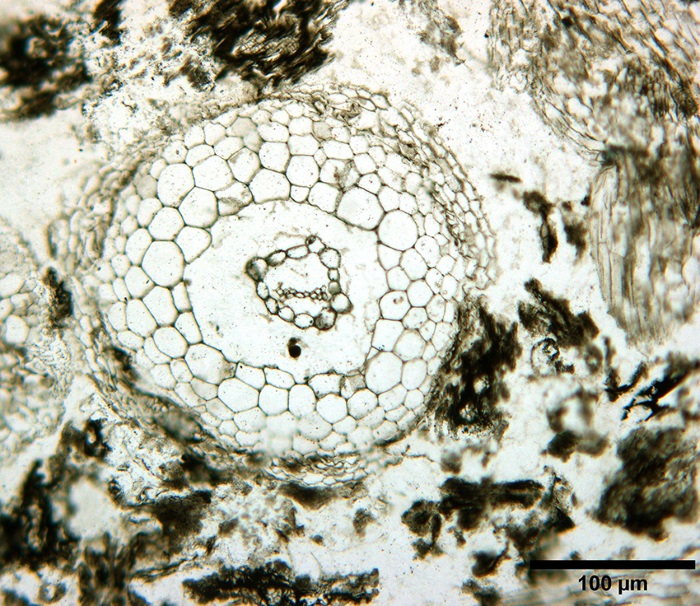
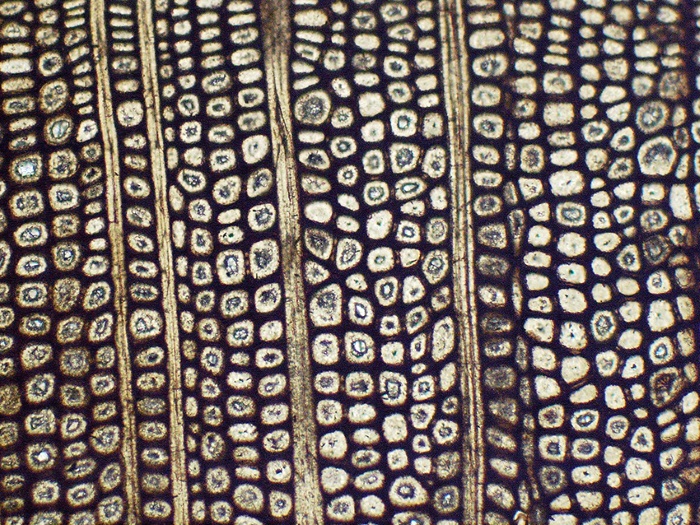
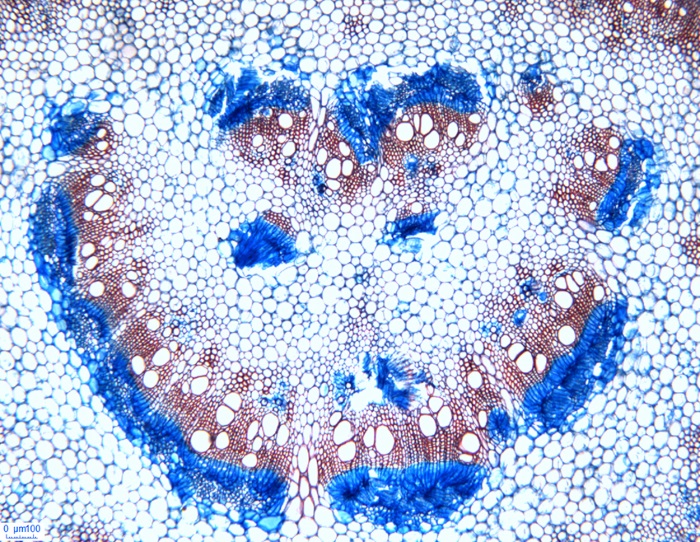
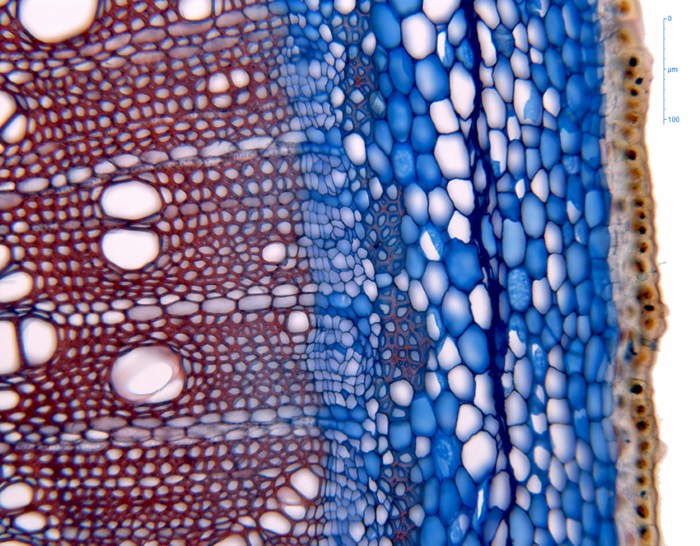
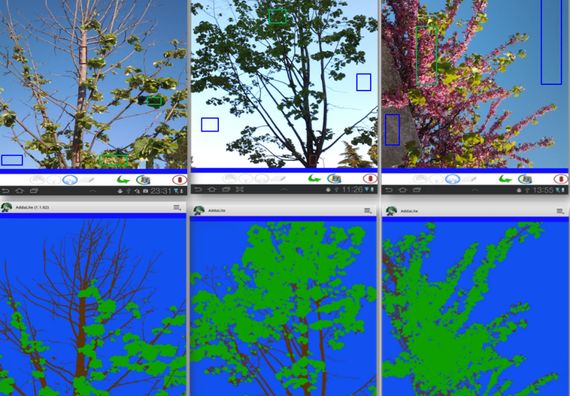
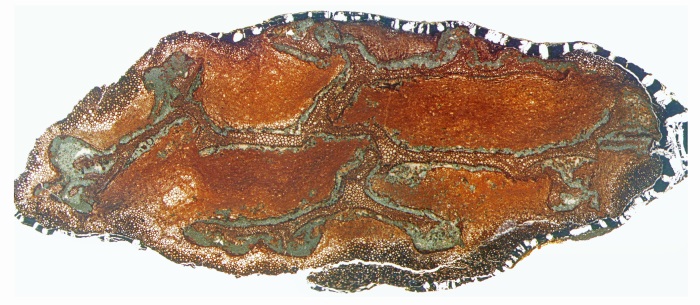
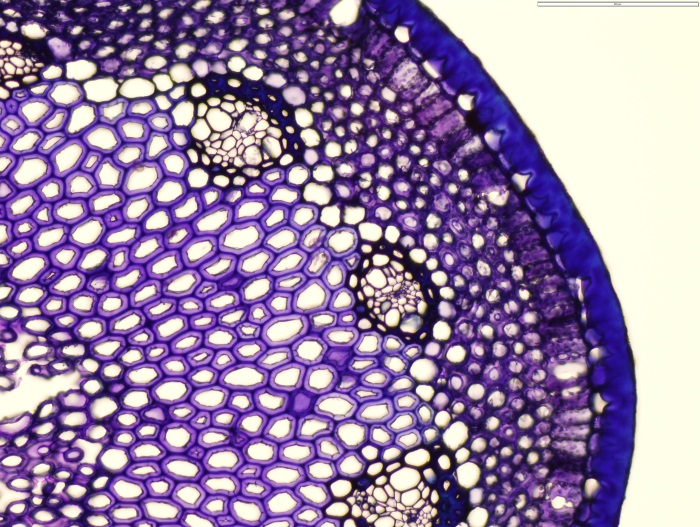
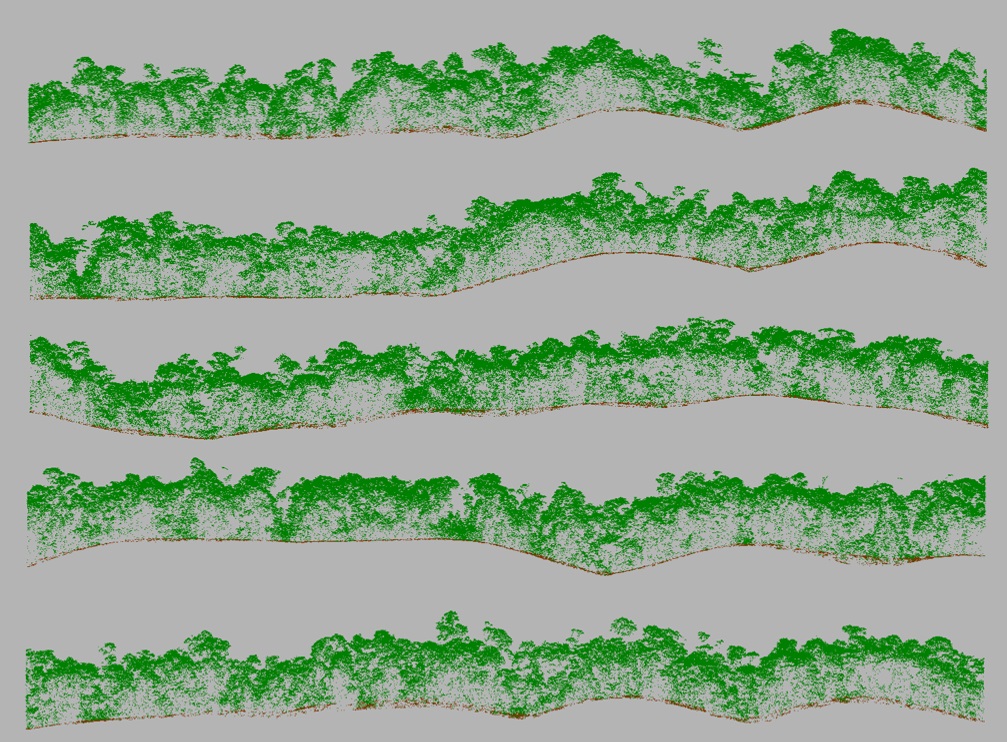
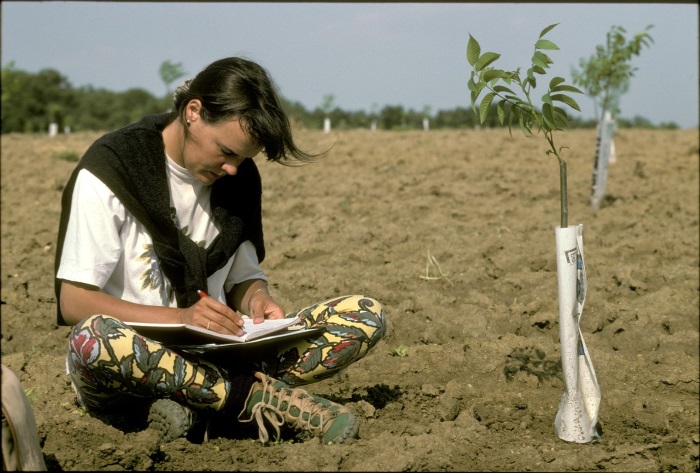
AMAP's biomechanics and histology platform allowing (1) mechanical measurements (in the laboratory and in the field) and (2) anatomical preparations and measurements. The main projects and international collaborations are carried out in Europe, French Guiana, Brazil and in the Republic of Congo.
| Acronym | Title | Duration |
|---|---|---|
| BIODIVERSITE ENVIRONNEMENT | Biodiversité et environnement - Réseau d'internationalisation sur l'évolution de la biodiversité Porteur : Nicholas ROWE | 2023 - 2024 |
| CACTUS BIOINSPIRE | Diversité structurelle des tiges chez les cactacées : évolution et applications bioinspirées Porteur : PATRICIA SOFFIATTI (UFPR) | 2022 - 2024 |

The GrowBot consortium is composed of 9 participants (7 public and 2 private):
- Fondazione Istituto Italiano di Tecnologia (IIT), Italie
- Helmholtz-Zentrum Geesthacht (HZG), Allemagne
- Tel Aviv University (TAU), Israël
- Gran Sasso Science Institute (GSSI), Italie
- Scuola Superiore Sant’Anna (SSSA), Italie
- University of Freiburg (UF), Allemagne
- Alleantia and Linari Engineering (ALE), Italie
- Arkyne Technologies SL –Bioo), Espagne
- UFPR Universidade Federal do Parana, Brazil
- S. Gourlet Fleury, E. Fourni, V. Rossi (CIRAD Forêts et Sociétés)